Hackathon — Space Innovation
Objective: Finding water on the rough surface of planet Mars using a Rover
This competition is an amalgamation of Robotics, Programming skills and Space exploration. The participants will assemble a Mars Rover that can autonomously detect the presence of water on the artificial Mars surface. Each team must have two participants. The teams must bring the working model of their Mars Rover to the venue of the competition. The program to accomplish the goal must be written and uploaded at the venue only. After detecting the water, the Mars Rover must raise a signal by glowing a red LED light as well as by playing a buzzer or speaker.
Innovative AI project designed to push the boundaries of technology and drive transformative change in various industries.
Rules & Regulations
- The length, width and height of the Mars Rover must not exceed 12 inches before starting the exploration, as well as during the exploration. The electrical and electronic components, except for the water or moisture sensor, should be made waterproof.
- Only the electric battery-powered Mars Rover is permitted to participate. Usage of internal combustion engines or pressurised gas or any other kind of combustible liquid or solid fuel is strictly prohibited.
- The Mars Rover must not be operated by using any kind of wired or wireless remote controllers or homing beacon. The Mars Rover may have autonomous guidance, and it may be able to explore according to the onboard control or program.
- The body of the Mars Rover must be constructed by the participants only. The usage of readymade prefabricated kits or commercially available toys, or partially assembled factory-made kits, is strictly prohibited.
- All types of motors, batteries, electronic sensors and programmable controller boards can be used. The Mars Rover body can be made by using plastic, wood, metal, cardboard or 3D printed parts only.
The layout of the rectangular platform used in the competition is given below.
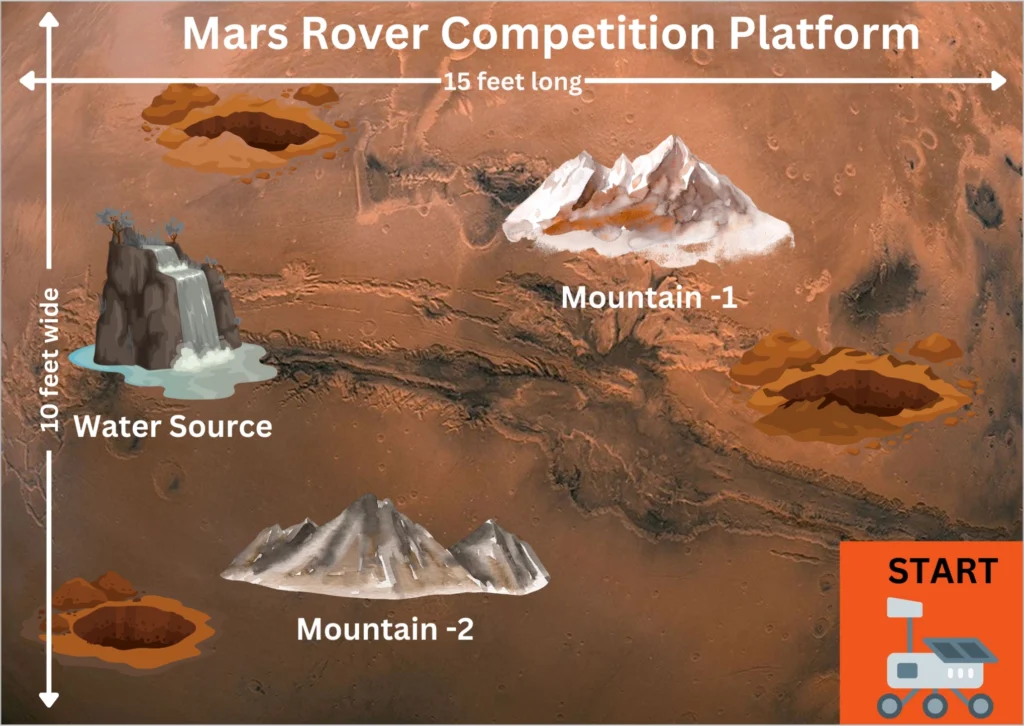
- The Length of the platform is 15 feet, and the Width of the platform is 10 feet. The platform is surrounded by wooden planks.
- Two mountains will be placed on the platform at random locations. The height of the mountains will be greater than 18 inches, and the area of the base of the mountains will be greater than 144 square inches.
- There will be a waterfall and a lump of moist soil. The water will be coming out from a wall fountain to the front side of the wall fountain, and the lump of moist soil will be placed on the back side of the wall fountain.
- The width of the waterfall will be 6 inches, the depth of the waterfall will be less than 2 inches, and the height of the waterfall will be more than 6 inches.
- The width of the moist soil lump will be 6 inches, the depth will be more than 2 inches, and the height will be more than 6 inches.
- The Mars Rover can detect either the moisture in the soil placed around the water fall, or it can detect the water coming out from the wall fountain and going to a sink made on the ground. Normal tap water will be used, having some amount of salt and minerals dissolved in it. After detection of water, the Mars Rover can make a signal by glowing an LED and playing a buzzer or speaker.
- The actual platform will be shown one day before the day of the competition. The participants can program their Mars Rover according to the actual layout of the platform.
- The team that will find the presence of water at the earliest will be the winner.
- The team which is not able to detect water within 10 minutes will be disqualified. The false detection of water by raising a false signal will lead to immediate disqualification.
- Also, the water detection signal must be raised only after the direct contact between the Rover sensors and the waterfall or the Rover sensors and moist soil.